Welkom op de zesde pagina van ons project! Hier bespreken we het Eindproduct van de Terrain Explorer.
Inleiding
Wij hebben de afgelopen maanden een robot getest en geoptimaliseerd voor verschillende omgevingen en taken. Dit testproces bracht zowel successen als uitdagingen met zich mee. Onze robot moest onder andere objecten detecteren, terreinen scannen, bedieningscommando’s uitvoeren en efficiënt bewegen over ruig terrein.
Tijdens het testen kwamen we verschillende obstakels tegen. De nauwkeurigheid van de objectdetectie bleek niet altijd optimaal, waardoor sommige objecten niet correct werden herkend. Daarnaast was het navigeren over oneffen terrein soms problematisch, vooral wanneer de ondergrond te ruw was. Toch hebben we met aanpassingen in de bouw en programmering van de robot veel van deze problemen kunnen verhelpen.
Een andere uitdaging was de batterijduur. Hoewel de robot lang genoeg functioneerde voor de meeste tests, moesten we ervoor zorgen dat hij consistent bleef presteren zonder onverwachte uitval. Ook hebben we getest of de robot correct reageerde op bedieningscommando’s, wat cruciaal is voor de nauwkeurige besturing.
Op deze pagina vind je alles over ons eindproduct, inclusief testresultaten en bevindingen. Daarnaast zijn er foto’s en video’s te vinden die een beter beeld geven van de prestaties van onze robot.
Eindontwerp
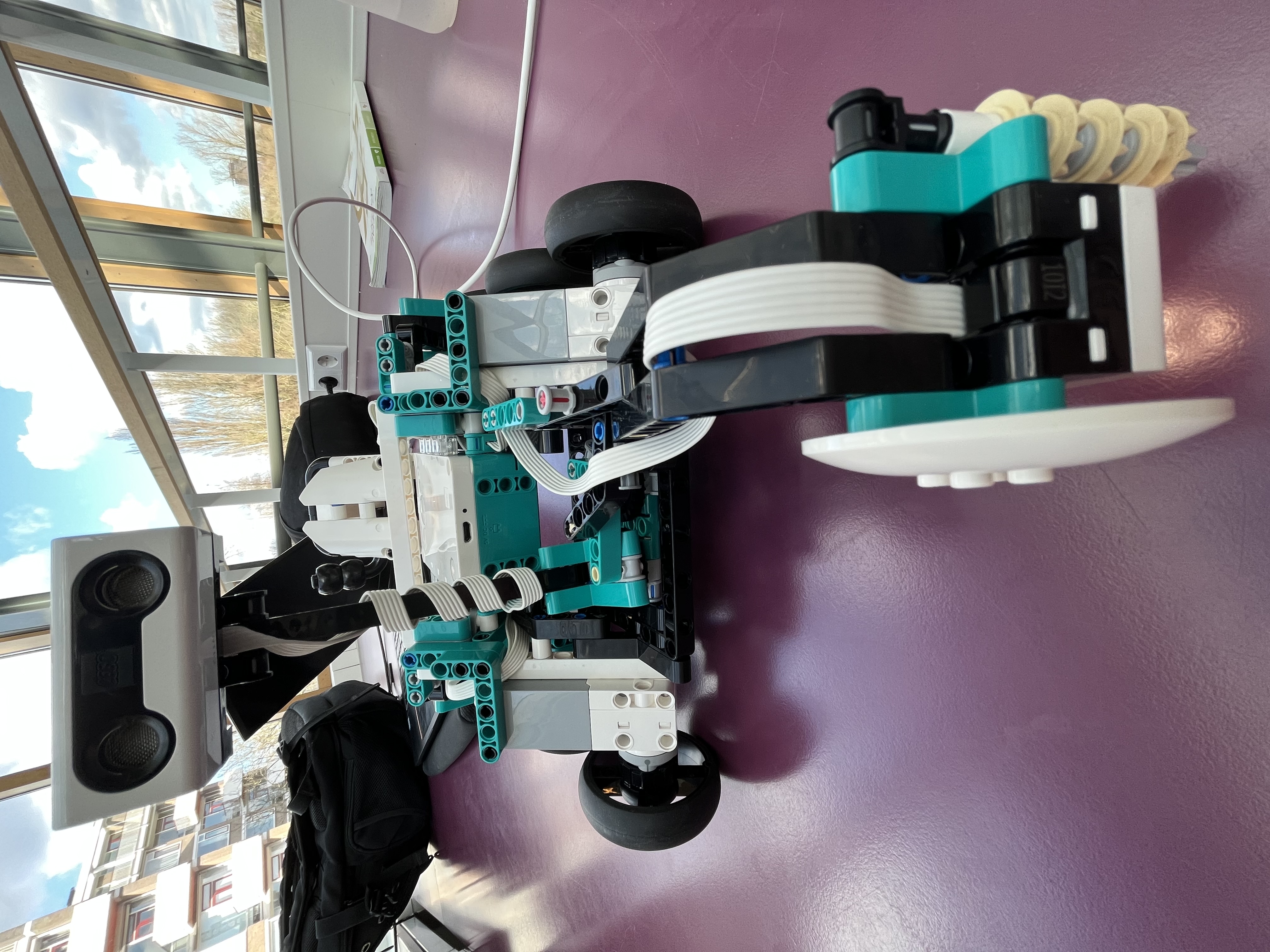
Wij hebben grotendeels hetzelfde ontwerp gebruikt dat we eerder hebben gemaakt, omdat het al een solide basis bood voor onze tests. Ons doel was om de robot te laten lijken op een echte exploratierobot, zoals de Marsrover. Daarom hebben we gekozen voor hetzelfde robuuste en functionele ontwerp met een stevige bouw, grote wielen en een stabiele constructie, zodat de robot zich soepel over het terrein kon bewegen.
Hoewel het oorspronkelijke ontwerp al goed functioneerde, hebben we enkele kleine aanpassingen gedaan om de prestaties te verbeteren. Zo hebben we de gewichtsverdeling beter uitgebalanceerd en getest of de robot voldoende grip had op verschillende ondergronden. Dit zorgde ervoor dat de Terrain Explorer nog beter kon functioneren in uitdagende omgevingen.
Bekijk de Ontwerp pagina voor meer details en visuals van ons eindontwerp.
Lego Mindstorms: Programmacode

Dit programma, geprogrammeerd in Lego MINDSTORMS, bestuurt autonoom de terrain explorer. Het begint met het initiëren van het programma, waarbij de lampen aangaan en de robot wordt ingeschakeld. De hoofdstructuur van het programma is een oneindige lus, waarin de robot continu vooruitrijdt met een snelheid van 25%. Tijdens het rijden controleert de robot of er een object binnen een afstand van 20 cm wordt gedetecteerd of een specifieke kleur wordt herkend. Zodra dit gebeurt, stopt de robot en schakelt het over naar een van de scanmethodes.
Als de robot een object tegenkomt, stopt hij met rijden en bepaalt welke scan moet worden uitgevoerd. Er zijn verschillende scanprocedures geprogrammeerd, afhankelijk van de kleur die de robot detecteert. Voor elk type object, zoals rode bloemen, sneeuw, water, gras of zonnebloemen, is er een aparte scanfunctie. Tijdens het scannen speelt de robot een bijbehorend geluid af en beweegt hij een klein stukje heen en weer om de omgeving beter te analyseren.
Daarnaast bevat het programma verschillende vooraf gedefinieerde functies die de robot helpen bij het uitvoeren van specifieke taken. De functie "stop driving" zorgt ervoor dat de robot volledig tot stilstand komt door alle motoren uit te schakelen. De functie "rotate right" laat de robot een gecontroleerde draai naar rechts maken en gebruikt een hoeksensor om de juiste oriëntatie te behouden.
Door dit programma kan de robot zelfstandig een terrein verkennen, objecten herkennen en registreren welke soorten objecten hij tegenkomt. Het combineert beweging, kleurherkenning en geluidsfeedback om de robot intelligenter te laten reageren op zijn omgeving. Dit zorgt ervoor dat hij effectief functioneert als een verkenningsrobot, vergelijkbaar met hoe echte exploratierobots, zoals de Marsrover, werken.
Release notes: PvE
Evaluatie van de huidige versie van de terrain explorer
De huidige versie van de terrain explorer voldoet grotendeels aan de gestelde eisen en specificaties, met enkele aanpassingen en uitzonderingen ten opzichte van het oorspronkelijke ontwerp. Gedurende de afgelopen maanden hebben we de robot uitgebreid getest en geoptimaliseerd voor verschillende taken. Dit testproces bracht zowel successen als uitdagingen met zich mee.
Gerealiseerde eisen:
- Verkenning en kleurdetectie: De robot maakt gebruik van een infraroodsensor en kan verschillende kleuren onderscheiden met een nauwkeurigheid van 85%, wat hoger is dan de minimale eis van 80%.
- Volledig automatische scan: Het scanproces verloopt zonder extra handelingen en zonder tussenkomst van de gebruiker.
- Compact ontwerp: De robot heeft een diameter van 26 cm en voldoet daarmee aan de eis van maximaal 30 cm.
- Ingebouwde batterij: De robot kan een volledige verkenning uitvoeren binnen de batterijduur van en 55 minuten.
- Objectdetectiegeluid: Bij het scannen van een object produceert de robot een geluidssignaal.
- Reactie op bedieningscommando’s: De communicatie tussen de robot en het besturingsprogramma verloopt vrijwel zonder merkbare vertraging, wat cruciaal bleek tijdens de tests.
- Veiligheid: De robot is ontworpen met afgeronde randen en een laag geluidsniveau om veilig te functioneren in huishoudens met kinderen en huisdieren.
- Batterij en opladen: De robot gebruikt een oplaadbare batterij die werkt met de standaard netspanning van 220-240V.
Niet gerealiseerde eisen:
- Duurzaamheid bij botsingen: Het ontwerp is bestand tegen herhaalde botsingen, maar langdurige stress kan lichte slijtage veroorzaken aan de ophanging en buitenkant.
- Gebruik van volledig recyclebaar materiaal: Hoewel ABS-kunststof is toegepast, zijn niet alle componenten van de robot 100% recyclebaar vanwege de gebruikte elektronica en batterijen.
Ontwerpaanpassingen:
- Geluidsindicatie: Het geluidssignaal bij objectdetectie is aangepast om subtieler en minder storend te zijn voor omgevingsgebruikers.
- Programmacode in Lego MINDSTORMS: De robot is geprogrammeerd om zelfstandig objecten te herkennen en registreren. De software bevat geavanceerde functies zoals kleurherkenning, bewegingscontrole en vooraf ingestelde scanprocedures voor verschillende kleurobjecten . Daarnaast bevat het programma functies om de robot te laten stoppen, draaien en nauwkeurig reageren op zijn omgeving.
Video's van het eindproduct
In de volgende video's zie je hoe de terrain explorer te werk gaat:
Deze twee video's focussen op de scanfunctie van de terrain explorer:
Deze twee video's focussen op de beweging over ruig terrein van de terrain explorer: